ROBOKIND v0.9.2 NOW AVAILABLE IN MAVEN
If you are using Robokind 0.9.2, you will need to add the sonatype repository to your pom.xml:
<repository>
<id>sonatype</id>
<name>sonatype</name>
<url>https://oss.sonatype.org/content/groups/public/</url>
</repository>
Our groupId is org.robokind, and the version is 0.9.2
<repository>
<id>sonatype</id>
<name>sonatype</name>
<url>https://oss.sonatype.org/content/groups/public/</url>
</repository>
Our groupId is org.robokind, and the version is 0.9.2
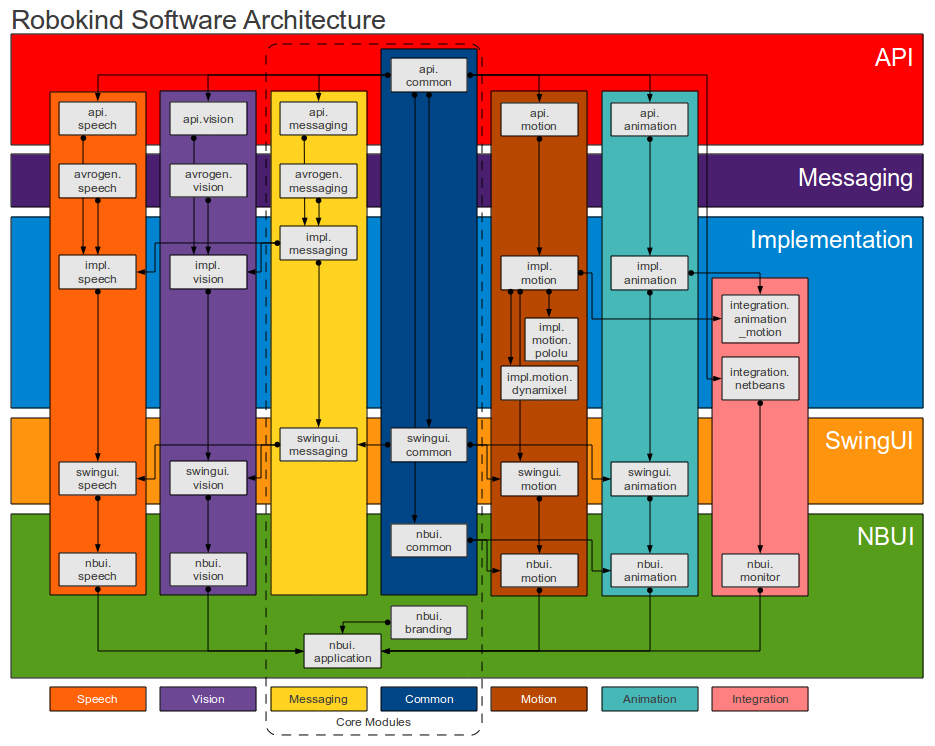
What does Robokind provide?
- Robokind provides low-level robotics control in three main areas: Motion, Vision, and Speech.
- Motion
- Move physical or virtual robots.
- Network-enabled movement control.
- Motion Blending for modular control, allows several components to simultaneously control a robot.
- Control several robots at the same time.
- Vision
- Camera Capture and image messaging across Java and C++.
- Distributed Vision System, designed to work across several processes.
- Easy OpenCV Integration with Face Detection example.
- Speech
- Supports Microsoft SAPI on Windows.
- Implementations for other platforms coming soon.
- Sensor Integration Module coming soon!
- Motion
- Robokind provides enterprise-level infrastructure to support complex robotics applications and long-term development.
- Messaging
- Modularity
- Architecture for Maintainability and Extensibility
- Cross-Platform Compatible
- Language Independent Protocols - Implemented in Java with clients in C++, accessible in C#, C, Ruby, and Python via Avro and Qpid directly.
Robokind is built on top of several leading Open-Source projects.
Robokind uses:
- Apache Felix OSGi
- Apache Avro
- Apache Qpid
- OpenCV
- JFlux
Robokind leverages more synergisms than you can shake a cornflower-blue stick at.
What more could you want?
The following features have been spun off into the RoboWorkshop project and are no longer part of RoboKind:
- User Interface
- Animation Editor
- 3D Simulator (Supplied by the CogChar project)
Robokind is intended only for low-level robotics control with no support for high-level planning and awareness. The focus of Robokind is kept narrow in an effort to prevent bloat and unkept overgrowth in the project.
What is Robokind NOT:
- Robokind does not provide high-level planning or decision making.
- Robokind does not provide visual awareness or vision based decision making.
- Robokind does not provide language understanding.